През последните няколко години учените от Харвард разработваха робот-пчела. Те са постигнали впечатляващи резултати в работата си: летящото устройство е по-малко от кламер, тежи само 100 милиграма и кръжи автономно. Устройството все още е прикрепено с кабел към батерия и няма вграден автономен контрол, но пък маха с криле като същинско насекомо.
Миниатюрните роботи-насекоми имат голям потенциал при спасителни операции, наблюдение и изследване, но най-големи са очакванията към мулти-модалните роботи: роботи, които могат да се адаптират към терени. Повечето роботи обаче не се справят на смесен терен. Съществуват няколко наземни роботи, които могат да се придвижват и във вода, както и няколко летящи роботи, които не са напълно безпомощни на земята, но все още не сме видяли летящи роботи, които са добри плувци. Досега!
Изследователита от Харвард наскоро представиха статия, в която обясняват по какъв начин техните роботи-пчели могат да се справят във вода. Без никакво хардуерно модифициране, харвардският робот RoboBee може да лети във въздуха, приземява се във вода и след това се превръща в малка подводница.
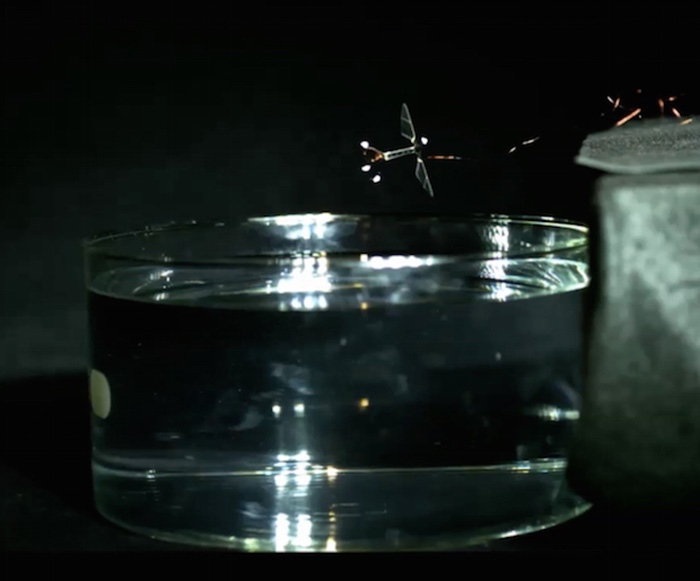
Когато RoboBee лети (или плува), това се случва под пълен контрол: система за движение следи позицията на робота и изпраща команди за траекторията към него. Тази система работи както във въздуха, така и под вода и методът на влизане на RoboBee е преднамерен (спускане, гмуркане, сблъсък и потъване). Вижте видеото, което показва как роботът-пчела преминава от въздух във вода.
Основното наблюдение е, че плуването в действителност много прилича на летенето: и в двата случая тялото се придвижва през течна/газообразна среда чрез движение на крило или плавник назад и напред. При летене и кръжене движението трябва да бъде много бързо, но при плуване движението е много по-лежерно. В същността си обаче движението е едно и също, което означава, че може да се постигне с един и същ хардуер. В случая с RoboBee, за да лети във въздуха размахът на крилете е с честота 120 Hz, докато за да плува във водата размахът е възможен само с 9 Hz.
Единственият проблем е, че заради малкия си размер RoboBee трудно навлиза под повърхността на водата; ето защо роботът трябва да се сблъска с водата, за да преодолее съпротивлението на повърхността. Ако към роботът се добави и батерия (и по този начин се увеличи масата му), обаче, този проблем може би ще бъде преодолян. Преходът от вода обратно към въздух също изглежда проблемен, и явно е по-труден от прехода въздух-вода; понастоящем изследователите обещават да работят по разрешаването на този проблем.


